SISTEM PENGGERAK RODA KENDARAAN
Keuntungan
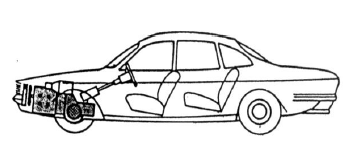
* Kenyamanan pada jalan aspal baik ( karena beban ada di depan ), traksi pada roda yang
dikemudikan
Kerugian
* Pada jalan lumpur roda penggerak cepat slip, jika tidak cukup beban pada aksel belakang ( traksi
pada roda penggerak jelek )
Contoh pemakaian : Pada banyak kendaraan ( Konstruksi Standard )

2. Penggerak Roda Belakang Motor belakang
Keuntungan
* Pada jalan lumpur traksi baik (traksi pada roda penggerak baik)
Kerugian
* Kenyamanan kurang pada jalan aspal, jika tidak cukup beban pada aksel depan (traksi pada roda yang dikemudikan kurang)
Contoh pemakaian : VW kodok (lama) bis Mb dan lain-lain

Keuntungan
* Keamanan tinggi, jika roda penggerak slip mobil masih stabil
* Traksi baik jika tidak terdapat banyak beban pada aksel belakang
Kerugian
* Traksi jelek jika terdapat banyak beban pada aksel belakang
Contoh pemakaian : Konstruksi lama Misalnya : Renault
4. Penggerak Roda Depan Motor Melintang
Keuntungan
* Menghemat tempat
* Penggerak sudut tidak di perlukan
* Poros propeler tidak diperlukan lagi
Kerugian
* Traksi jelek jika terdapat banyak beban pada aksel belakang

Keuntungan
* Traksi sangat baik
Kerugian
* Harga mahal dan berat

Pada sistem penggerak empat roda dapat dibedakan :
a. Penggerak empat roda selektif
* Dapat menggunakan aksel belakang pada jalan baik
* Aksel depan dapat dihubungkan pada jalan jelek
b. Penggerak empat roda permanen
* Memerlukan penyeimbang antara kedua poros penggerak ( Mis : Diferensial, Kopling Visco )
* Lebih mahal
Contoh pemakaian : Kendaraan lapangan, Militer dan lain-lain
Mis : Toyota Land Cruiser, Daihatsu Taft dan lain-lain

Tidak ada komentar:
Posting Komentar